دیباچه
این روزها تولیدکنندگان خودرو تلاش میکنند تا راههایی برای ایمن کردن خودروها ایجاد کنند. نظارت بر اقدامات راننده توسط تکنیکهای بینایی کامپیوتر برای تشخیص بلادرنگ اشتباهات رانندگی و سپس برنامهریزی برای رانندگی مستقل برای اجتناب از برخورد خودرو یکی از مهمترین مسائلی است که در بینایی ماشین و سیستمهای حمل و نقل هوشمند مورد بررسی قرار گرفته است. هدف اصلی این مطالعه جلوگیری از حوادث ناشی از خستگی، خوابآلودگی و حواسپرتی رانندگان است. برای جلوگیری از این حوادث، این مقاله یک سیستم ایمنی یکپارچه را پیشنهاد میکند که به طور مداوم راننده و محیط اطراف خودرو را نظارت میکند و در نهایت تصمیم میگیرد که وضعیت فعلی خودرو ایمن است یا خیر. برای این منظور، ما یک خودروی معمولی بنام 'فراز' را با یک سیستم بینایی که متشکل از چهار دوربین نصبشده همراه با یک ابزار جامع برای ارتباط با سنسورهای نصبشده فعلی و دیگر سیستمهای خودرو و ارسال فرمانها به عملگرهای مختلف است، مجهز کردیم. سیستم بینایی از یک شبکه رمزگذار-رمزگشای کانولوشنال عمیق برای درک صحنه و از تشخیص حالت راننده بهره میگیرد. ما در این مطالعه تواناییهای داخلی برای توسعه فناوری توسط وسایل نقلیه مرسوم به منظور تولید خودروهای هوشمند و یک سیستم هوشمند برای افزایش ایمنی و کمک به راننده در شرایط یا موقعیتهای مختلف را بررسی کردهایم.

۱ دانشگاه تحصیلات تکمیلی علوم پایه زنجان، ایران
۲ دانشگاه چارلز در پراگ، جمهوری چک
۳ پژوهشگاه دانشهای بنیادی، تهران، ایران
* نویسنده مسئول
ایمیل: ansari at iasbs dot ac dot ir
خودرو نیمهخودکار که آن را با نام خودروخودران میشناسیم، وسیله نقلیهای است که ویژگیهای یک ماشین سنتی را همراه با قابلیت حملونقل بدون دخالت انسان دارد. یک سیستم بدون راننده با درک محیط اطراف براساس فرآیندهای دینامیک که منجر به ایمنی میشود، خودرو را هدایت میکند.
آنطور که به نظر میرسد، مطالعات انجام شده برای رسیدن به ماشینهای خودران به ایجاد سیستمهای کمک راننده منجر شده است. از دیدگاه دیگر، یک سیستم کنترل کامل خودرو، بدون درنظرگرفتن سیستمهای مختلف کمک راننده و همچنین استفاده از بزرگراههای هوشمند، بیمعنی است.
هدف اصلی ما در این کار ایجاد یک خودرو نیمهخودکار با ادغام برخی از روشهای پیشرفته در بینایی کامپیوتر و یادگیری ماشین برای کمک به رانندگان در لحظات بحرانی و خطرناک است که در آن راننده قادر به هدایت ماشین با ایمنی کامل نیست.
قالب استناد
@article{khojasteh2018safetysystem,
author = {{Abdi Khojasteh}, Hadi and {Abbas Alipour}, Alireza and Ansari, Ebrahim and Razzaghi, Parvin},
title = {An Intelligent Safety System for Human-Centered Semi-Autonomous Vehicles},
journal = {CoRR},
volume = {abs/1812.03953},
year = {2018},
url = {https://arxiv.org/abs/1812.03953},
archivePrefix = {arXiv},
eprint = {1812.03953}
}
کدها و الحاقیات
منابع بیشتر را بر روی
گیتهاب دنبال کنید:
- کدهای تست (نوشته شده با C++/OpenCV)
- کدهای نسخه نمایشی
- اطلاعات ارتباط سخت افزار
- منابع مرتبط با پروژه
آخرین بهروزرسانیهای پروژه را از طریق
ریسرچگیت دنبال کنید و مقاله را بر روی
arXiv بررسی کنید.
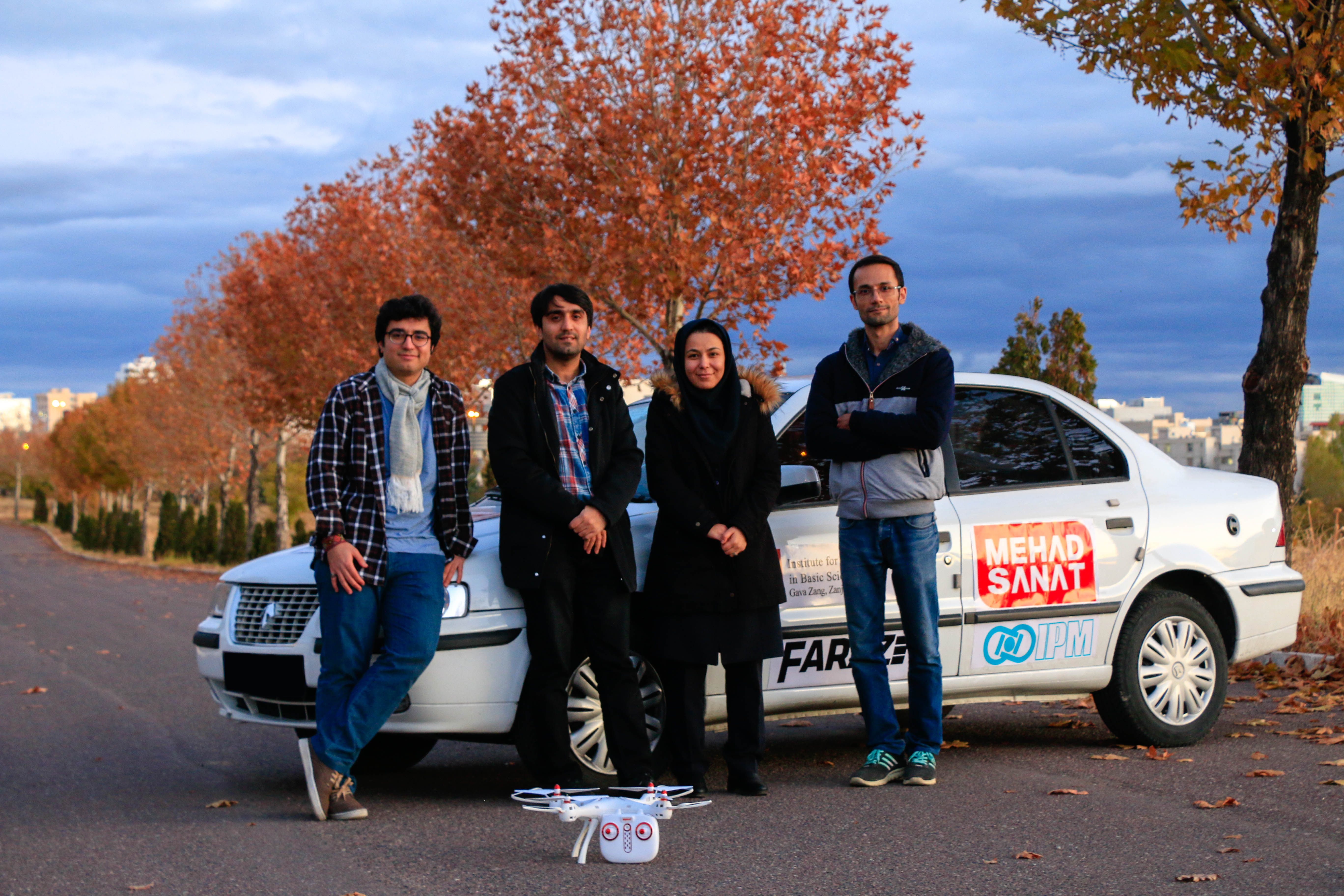
خودروی تجهیزشده
خودرو و
پهپاد که با سیستم بینایی متشکل از چهار دوربین نصبشده و دوربین پهپاد همراه با یک ابزار جامع برای ارتباط و ارسال دستورات به خودرو تجهیز شده است.
دوربین کیفیت بالای زاویه باز جلو و عقب در نزدیکی مرکز شیشه ماشین نصب شدهاند.
دوربین راننده در مرکز چشم انداز جاده نصب شده است.
دوربین کابین خودرو در مرکز سقف خودرو نصب شده است که شمای کلی بدن راننده را ضبط میکند.
درک صحنه رانندگی / تشخیص حالت راننده
درک کلی صحنه به همراه معماری یک مدل شبکه رمزگذار-رمزگشای کانولوشنال عمیق برای بخش بندی تصویر و تشخیص مسیر نمایش داده شده است. این کار به ترتیب شامل
تبدیل هندسی،
شبکه رمزگذار-رمزگشا،
تشخیص فضای آزاد،
تبدیل پرسپکتیو،
ماسککردن،
فیلترکردن،
تشخیصلبه،
تخصیص مسیر و
ردیابی است.
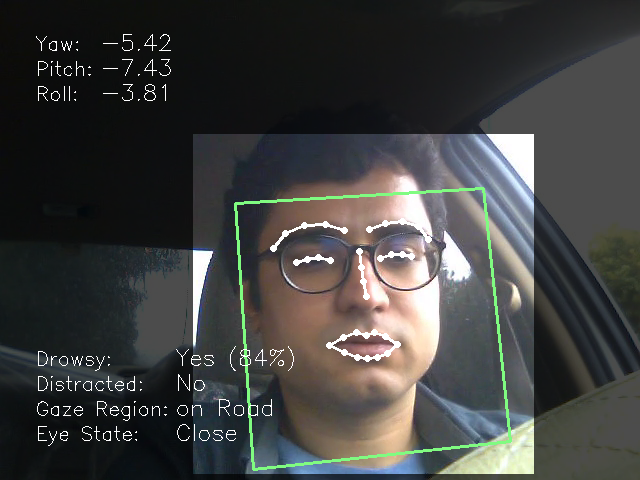
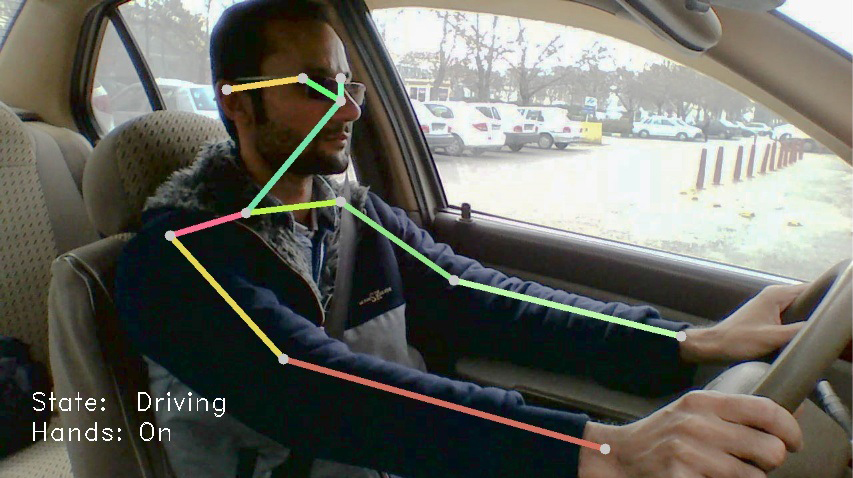
تشخیص
نگاه،
ژستسر،
خوابآلودگی و حواسپرتی راننده و یک مدل بلادرنگ برای تخمین نقاط کلیدی بدن راننده بر روی تصاویر خروجی دوربین کابین خودرو پیادهسازی شده است که استخوانبندی بدن شامل سر، مچدست، آرنج و شانه را تشخیص داده و با خطوط رنگی متمایز می کند.
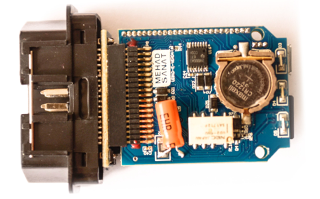
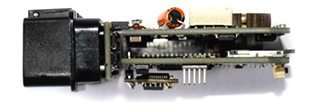
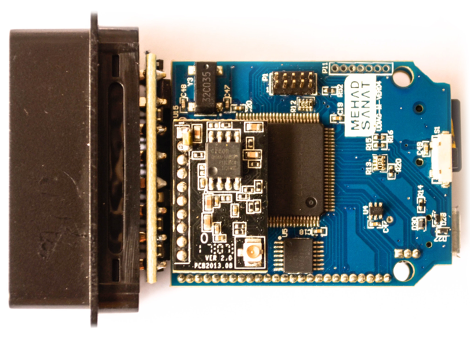
دستگاه ارتباطات داخلی خودرو
نمای بالا، پایین و چپ ابزار جامع عیبیابی وسایل نقلیه (معروف به
UDIAG) که به درگاه عیبیابی متصل شده و ارتباطات را با شبکه داخلی خودرو برقرار میکند.
رابط شبکه خودرو،
منبع تغذیه،
واحد پردازش،
ذخیرهساز دادهها،
آداپتور بیسیم و
سوکت میکرو یواسبی در شکل نمایش داده شدهاند.